Calculs relevķs dans le site : http://www.zugdrachen-antriebssystem.de/rechenbeispiel.html
(ceci est une traduction automatique).
Travaux spķcialisķs sur le systĶme
de propulsion de cerf-volant de remorquage
Propulsion ķcologique pour les navires de SkySails
Force motrice et contr¶le
Ces informations sont une approche Ó
titre indicatif, car la voile auto portķe est plus efficace
qu'une voile volante de
traction simple, non contr¶lķe, comme l'est la Skysails.
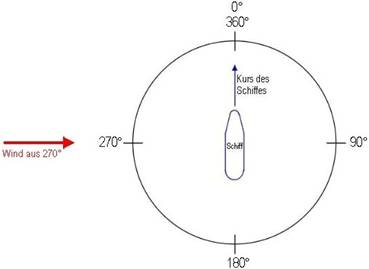
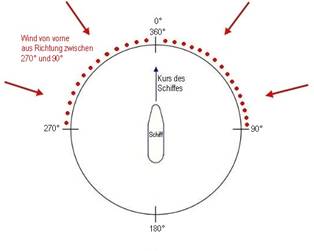
Pour simplifier les informations sur la
direction du vent dans les explications suivantes, on suppose que le navire se
dirige toujours vers le nord, c'est-Ó-dire dans la direction de 0 ░.
Les prķmisses suivantes sont considķrķes comme allant de soi pour limiter la
portķe du prķsent travail, d'autant plus qu'il n'est pas important de rķsoudre
le problĶme en cause pour comprendre le fonctionnement du systĶme de propulsion
du cerf-volant de remorquage.
On suppose que le Cd et Ca sont constants, de sorte que la fois
la force de la flottabilitķ et la force de traŅnķe lors du changement
de l'angle d'attaque de l'aile de remorquage, mais aussi un changement du
profil au cours des opķrations de contr¶le ne changent pas.
De plus, on suppose que le poids total des attaques de cerf - volant et de
la corde dans le boŅtier de commande de sorte que la corde reste
parfaitement tendu et est droit, ce qui est le cas dans la rķalitķ , car
la corde dķcrit une ligne non-courbe en raison de la rķpartition du poids
peut.
En outre, il est supposķ que le vent est "ķgal" Ó toutes les
altitudes de toutes ses composantes, ce qui est irrķaliste puisque le vent
varie en amplitude et en direction en fonction de l'altitude.
Le chapitre 6.3. est divisķ en quatre cas, qui se rapportent Ó la
direction du vent existante.
6.3.1. Vent de 180 ░ (1er cas)
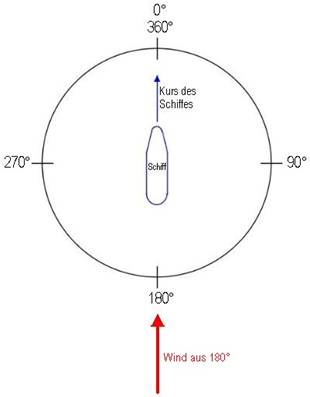
En supposant que le vent est de 180 ░, le bateau est Ó l' arrĻt, les
lignes de commande sont dans la position neutre et la force de rķsistance FW et
le poids FG sont nķgligķs, seule la force de poussķe FA agit de fańon Ó ce que
le cŌble de traction perpendiculaire Ó La surface de l'eau est.
Compte tenu de la force de rķsistance FW1 (l'index 1 indique qu'il s'agit de la
force de rķsistance du premier cas), une autre composante de force apparaŅt,
qui pousse le cerf-volant de remorquage dans la direction du vent.

Ces deux
vecteurs de force ajoutķs ensemble donnent maintenant un nouveau vecteur de
force appelķ la force aķrienne FL1. Son importance et sa direction peuvent
Ļtre calculķes avec le parallķlogramme de force (voir figure 6).:
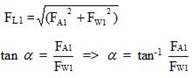
Il est ![]() l'angle
entre la surface de l' eau et de la force de l' air FL1. La
direction de l'armķe de l'air FL1 est d'accord avec ce point avec le
Zugseilrichtung.
l'angle
entre la surface de l' eau et de la force de l' air FL1. La
direction de l'armķe de l'air FL1 est d'accord avec ce point avec le
Zugseilrichtung.
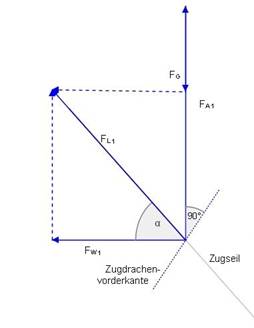
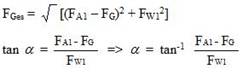
Cependant,
compte tenu de la force de poids FG, il en rķsulte une nouvelle force totale
FGes agissant sur le cerf-volant de remorquage (voir croquis 7):
On considĶre que la force de propulsion totale FVor qui tire le navire vers
l'avant est ķgale Ó la force de rķsistance FW1 dans ce cas, car c'est la seule
composante de force dirigķe vers l'avant. La force dynamique FA 1 peut
Ļtre utilisķ pour la propulsion dans ce cas, en aucun cas, car il agit
toujours perpendiculaire Ó la direction du vent, alors quand un vent de
derriĶre seulement angle droit peut affecter la direction du Voyage.
Les hypothĶses formulķes jusqu'ici reposaient sur l'hypothĶse que le navire est
stationnaire. Comme le bateau est mis en mouvement par la propulsion, la
vitesse d'ķcoulement change au niveau du cerf-volant de remorquage. Donc,
pour obtenir la nouvelle vitesse d'approche Wnew sur le cerf-volant de
remorquage, la vitesse du navire doit Ļtre dķduite de la vitesse de vent
rķellement existante W.
Ainsi, Ó faible vitesse, une grande force de propulsion FFor et un rķsultat de
conduite rapide. Dans les cas extrĻmes, lorsque les moteurs
fournissent une vitesse ķlevķe correspondante du navire, aucune force de propulsion
peut Ļtre produit par la propulsion de cerf - volant de remorquage
plus.
Etant donnķ que le cerf - volant est construit profilķe et possĶde un
coefficient de traŅnķe de fańon correspondante faible, sa flottabilitķ
normalement en fonction du rapport de CA Ó glisser est beaucoup plus
ķlevķe que sa rķsistance, de sorte qu'il est souhaitable d'utiliser aussi
une partie de la force de levage pour la propulsion dans les cas possibles
,
Pour illustrer ce processus, il est supposķ qu'il y a un vent de travers Ó
angle droit. Par consķquent, dans le cas suivant, seule la force de
flottabilitķ peut Ļtre utilisķe pour la propulsion, tandis que la force de
rķsistance est dirigķe perpendiculairement Ó la direction de dķplacement.
6.3.2. Vent
de 90 ░ ou 270 ░ (2Ķme cas)
Les hypothĶses retenues correspondent Ó
celles du premier cas, Ó l'exception de la direction du vent. Le bord
d'attaque du cerf-volant de remorquage doit faire face au vent et est donc
alignķ parallĶlement Ó l'axe longitudinal du navire. A nouveau, la corde
de traction est initialement perpendiculaire Ó la surface de l'eau, en raison
de la force Ó simple effet, Ó savoir la flottabilitķ ascendante FA2.
Pour illustrer la situation suivante mieux, on suppose que le spectateur Ó
l'abri du navire se trouve, il semble que le vent, et le navire dķplacķ de son
point de vue Ó droite. Est maintenant raccourci la ligne de direction Ó
droite de ce point de vue, la quantitķ de force de levage augmente d'une part Ó
la moitiķ droite du cerf-volant de traction (voir. Esquisse 9), qui est nķgligķ
parce qu'il croyait que CA reste constante, mais il est en train de changer la
direction la force de flottabilitķ.
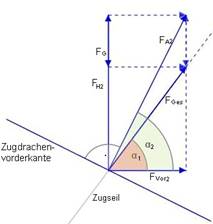
En effet, alors qu'auparavant les angles ![]() et
et ![]() sont
ķgaux ķtķ grande entre l'axe qui forme la corde de traction, et les forces de
flottabilitķ qui sont gķnķrķs respectivement par une moitiķ de l'aile de
traction (voir fig . Schķma 10) de sorte que la puissance totale a
ķtķ dķmontrķ dans la direction du cŌble de traction, est maintenant
l'angle est
sont
ķgaux ķtķ grande entre l'axe qui forme la corde de traction, et les forces de
flottabilitķ qui sont gķnķrķs respectivement par une moitiķ de l'aile de
traction (voir fig . Schķma 10) de sorte que la puissance totale a
ķtķ dķmontrķ dans la direction du cŌble de traction, est maintenant
l'angle est ![]() supķrieur
Ó l'angle
supķrieur
Ó l'angle ![]() (voir
croquis 11).
(voir
croquis 11).
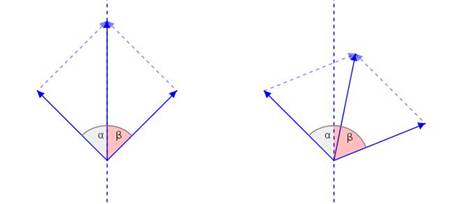
Cela est d¹ Ó la flexion du bord d'attaque du cerf-volant de remorquage rķel
par le raccourcissement de la ligne de commande droite.
Ainsi donc , la force de levage FA2 n'agit dans le cŌble de
traction (voir. Schķma 12) qui correspond Ó un changement de l'angle de la
corde rķsultat Zugdrachenvorderkante, puisque ceux - ci
perpendiculairement Ó la force de flottabilitķ FA2.
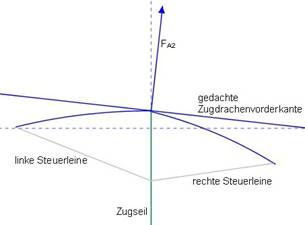
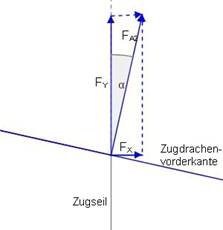
En consķquence, la force de flottabilitķ FA2 peut Ļtre divisķe en deux
composants: un composant FY, qui continue Ó pointer dans la direction du cŌble
de traction, et le composant de force FX, qui lui est perpendiculaire (voir
Figure 13).
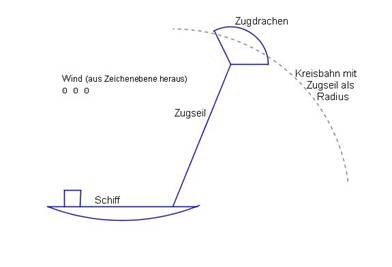
Cette ķmanant de la composante de force FX cerf - volant provoque
ķgalement un mouvement droit du cerf - volant de traction vers la droite,
de sorte que sur une trajectoire circulaire avec la corde lorsque le
rayon vers l'avant (voir fig . Schķma 14).
Si vous ramenez maintenant les lignes de contr¶le Ó leur position neutre, ce
qui signifie que le bord d'attaque du cerf-volant de remorquage est maintenant
perpendiculaire Ó la corde de traction, le cerf-volant conserve la nouvelle
position dans laquelle il se trouve. En effet, la force de flottabilitķ
FA2 pointe Ó nouveau dans la mĻme direction que la corde de traction.
Cependant, ce qui porte les lignes de direction non en position neutre,
mais elle laisse dans le cadre dķcrit ci - dessus, le cerf - volant
se dķplace toujours plus vers la droite jusqu'Ó ce qu'il atteigne la surface,
parce que la perpendiculaire Ó la composante de force de corde FX reste. Cela
signifie que, thķoriquement, en utilisant dķlibķrķment le contr¶le avec le
cerf-volant de remorquage, on peut atteindre n'importe quelle position sur le
demi-cercle perpendiculaire Ó la direction du vent avec le "tirant"
du rayon.

Le mĻme effet que le raccourcissement
permanent d'une ligne de contr¶le est le poids FG dĶs que le cerf-volant ne se
trouve plus au zķnith: le cerf-volant se dķplacerait ķgalement vers la surface
de l'eau.
Ceci peut Ļtre expliquķ en divisant la force de flottabilitķ Ó l'aide d'un
parallķlogramme de force, puis en soustrayant le poids de la composante de
force ascendante FH2. La nouvelle force totale FGes n'est pas
perpendiculaire au bord d'attaque du cerf-volant de remorquage et ne pointe
donc pas dans la direction de la corde de traction.
Ce mouvement vers la surface de l'eau ne peut Ļtre empĻchķ que par
contre-attaque. La longueur des lignes de commande doit donc Ļtre modifiķe
pour que la force totale FGes pointe Ó nouveau dans la mĻme direction que le
cŌble de traction.
En rķsumķ, on peut affirmer que le cerf-volant conserve sa position dans
n'importe quelle position lorsque les lignes de commande sont en position
neutre et que la force de poids FG est nķgligķe. Un changement de position
est effectuķ en raccourcissant temporairement les lignes de commande sur un
c¶tķ du cerf-volant de remorquage jusqu'Ó ce que la position souhaitķe soit
atteinte. Le poids est compensķ par une contre-attaque permanente.
Pour pouvoir calculer la force motrice FVor2, les considķrations suivantes
doivent Ļtre prises en compte: ![]() 1
entre le cŌble de traction et la surface de l'eau peut Ļtre ajustķ Ó l'aide du
boŅtier de commande et de la force de poids FG et des donnķes nķcessaires au
calcul de la force de levage FA2, que l'on peut trouver au Chap. 6.1. ķmergent
sont accessibles dans la rķalitķ. Cela se traduit par la relation, comme
on peut le voir sur le schķma 16, Ó partir de laquelle la force de propulsion
FVor2 peut Ļtre calculķe.
1
entre le cŌble de traction et la surface de l'eau peut Ļtre ajustķ Ó l'aide du
boŅtier de commande et de la force de poids FG et des donnķes nķcessaires au
calcul de la force de levage FA2, que l'on peut trouver au Chap. 6.1. ķmergent
sont accessibles dans la rķalitķ. Cela se traduit par la relation, comme
on peut le voir sur le schķma 16, Ó partir de laquelle la force de propulsion
FVor2 peut Ļtre calculķe.

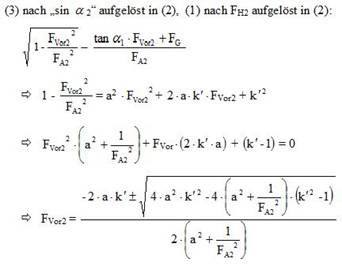
Puisque FVor2 doit Ļtre positif et a et positif, si ![]() 1
est compris entre 0 ░ et 90 ░, seul un "+" peut apparaŅtre devant la
racine, sinon le numķrateur et donc la fraction entiĶre seraient nķgatifs, le
dķnominateur ķtant toujours positif ,
1
est compris entre 0 ░ et 90 ░, seul un "+" peut apparaŅtre devant la
racine, sinon le numķrateur et donc la fraction entiĶre seraient nķgatifs, le
dķnominateur ķtant toujours positif ,
En outre:
![]()
o∙ est ![]() l'angle
entre le bord de remorquage et la corde de traction.
l'angle
entre le bord de remorquage et la corde de traction.
Parce qu'avec un angle dķcroissant ![]() 1,
le composant Ó action ascendante FH2 de la force de flottabilitķ FA2 devient
plus petit, tandis que la composante de force Ó action directe FVor2 devient
plus grande, cet angle doit Ļtre rķduit au minimum afin de produire une force
de propulsion aussi grande que possible.
1,
le composant Ó action ascendante FH2 de la force de flottabilitķ FA2 devient
plus petit, tandis que la composante de force Ó action directe FVor2 devient
plus grande, cet angle doit Ļtre rķduit au minimum afin de produire une force
de propulsion aussi grande que possible.
En rķalitķ, ce processus limite cependant le fait que le cerf-volant de
traction et surtout le cŌble de traction sont trop proches de la surface de
l'eau. De plus, il peut Ļtre utile pour des raisons de vent existant ![]() de
maintenir la hauteur de travail du cerf-volant de remorquage et donc
l'angle 1 plus grand.
de
maintenir la hauteur de travail du cerf-volant de remorquage et donc
l'angle 1 plus grand.
On peut ķgalement voir d'aprĶs le dessin que plus la corde de traction et le
systĶme de cerf-volant de remorquage sont lourds, plus la force de propulsion
FVor2 est faible, puisque le composant FH2 agissant en montant doit augmenter
pour maintenir le cerf-volant en place.
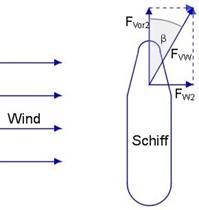
Ensuite, la force de rķsistance FW2 est
introduite. Pour cela, la situation existante doit Ļtre considķrķe du
point de vue supķrieur. La composante de force FVor2 agit donc en avant,
tandis que la force de rķsistance FW2 est dirigķe dans la direction du vent. Il
en rķsulte que l'angle ![]() entre
l'axe longitudinal du navire et que le cŌble de traction est exprimķe par
l'ķquation suivante:
entre
l'axe longitudinal du navire et que le cŌble de traction est exprimķe par
l'ķquation suivante:

Sur la force de rķsistance Ó la propulsion FW2 n'a aucun effet parce qu'il
agit dans la direction du vent, qui est perpendiculaire Ó la direction de
Voyage.
Les hypothĶses prķcķdentes ont ķtķ faites Ó condition que le navire soit
stationnaire.
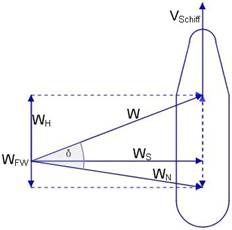
Cette nouvelle composante du vent, composķe du flux d'air WFW et du vent rķel
W, s'ķcoule donc dans une plage comprise entre 270 ░ et 0 ░ ou 0 ░ et 90 ░ au
niveau du cerf-volant.
6.3.4. Vent
de direction entre 270 ░ et 0 ░ ou 0 ░ et 90 ░ (4Ķme cas)
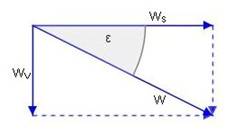
Le quatriĶme
cas se comporte presque complĶtement analogue Ó la troisiĶme cas, ķgalement le
vent doit Ļtre d' abord divisķ en deux composantes, Ó la diffķrence qui
existe entre 0 ░ en plus de la composante de vent de travers WS 90 ░
et 270 ░, une composante de vent de face WV ,
La prķsentation avec deux cerfs-volants de remorquage, qui sont chacun
perpendiculaires aux deux composantes du vent, est ķgalement appliquķe de
maniĶre analogue.
Pour le calcul de la force motrice FVor a changķ par rapport au troisiĶme
cas, seul le montant de la force ne doit pas Ļtre utilisķ pour la
rķsistance FW1, mais un signe nķgatif doit Ļtre rķglķ avant que le montant
parce que cette rķsistance n'est plus dans le sens de la marche , mais
agit contre la direction du voyage.
La propulsion ne peut donc Ļtre gķnķrķe que par la composante vent de
travers. Cela fonctionne aussi longtemps que la force de rķsistance
engendrķe par le vent de face grandeur FW1 est ķgale Ó la force
de propulsion gķnķrķe par le composant crosswind FVor2.
Le fabricant des Zugdrachenantriebssystems indique qu'il est possible avec la
propulsion du cerf - volant de traction pour entraŅner un angle jusqu'Ó 50
░ par rapport au vent. Cela signifie que applique le dernier cas
possible:
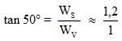
Si la composante de vent WV est plus grande, la propulsion de cerf
- volant de traction, de sorte qu'il ne peut plus Ļtre utilisķ.
Aussi l'angle ![]() entre
le cŌble de remorquage et l'axe longitudinal du navire peut Ļtre calculķ de
maniĶre analogue au troisiĶme cas.
entre
le cŌble de remorquage et l'axe longitudinal du navire peut Ļtre calculķ de
maniĶre analogue au troisiĶme cas.
Le fait que les formules que nous avons apprises dans ce chapitre soient
ķgalement applicables sera illustrķ dans l'exemple suivant pour un calcul de la
force de levage et de la position du cerf-volant sur le navire.
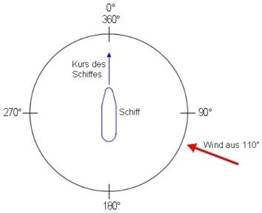
Exemple de calcul pour clarifier les
rķsultats prķcķdents
|
|
Donnķes: Ę
Vent
de 110 ░ Ę
Vitesse
du vent W Ó hauteur de travail: 40 km / h Ę
Poids
(corde de remorquage + cerf-volant de remorquage + nacelle de contr¶le): 500
kg Ę
Aire
de remorquage A: 160 Ę
cA
du cerf-volant de remorquage: 0.9 Ę
cW
du cerf-volant de remorquage: 0.1 Ę
Densitķ
de l'air Ó la hauteur de travail: 1,2 kg / Ę
Angle Ę
Force
de propulsion totale Fvor Ę
Angle |
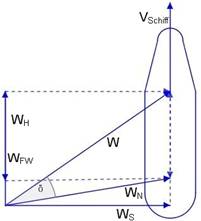
1Ķre ķtape: diviser le vent en composantes WH et WS:
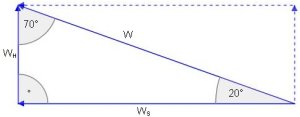
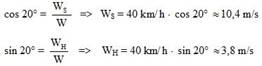
2Ķme ķtape: calculer la force de propulsion Ffor:

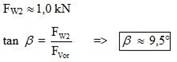
3Ķme ķtape: calculer ![]() :
:
Avec les angles donnķs ![]() 1
et
1
et ![]() maintenant
la position du cerf-volant de remorquage peut Ļtre dķterminķe, si la longueur
du cŌble est connue. Maintenant, le navire, entraŅnķ par le systĶme de
propulsion et le moteur du cerf-volant, devrait avancer Ó une vitesse de 25 km
/ h. Nous recherchons FVor et
maintenant
la position du cerf-volant de remorquage peut Ļtre dķterminķe, si la longueur
du cŌble est connue. Maintenant, le navire, entraŅnķ par le systĶme de
propulsion et le moteur du cerf-volant, devrait avancer Ó une vitesse de 25 km
/ h. Nous recherchons FVor et ![]() :
:
1Ķre ķtape: Calcul des composantes du vent WS et WV:

2Ķme ķtape: Calcul de la force de propulsion FFor:

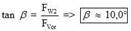
3Ķme ķtape: Calcul de ![]() :
:
La force de propulsion FFor diminue dĶs que le navire est mis en mouvement, car
la composante vent arriĶre est plus petite ou mĻme un vent contraire.
Cependant, avec le systĶme de propulsion par cerf-volant de remorquage, il est
possible d'augmenter la force de propulsion F avant par un "vol
dynamique", quelles que soient les conditions existantes.